Acople por vacío para brazo robótico
Acople por vacío para brazo robótico
Fabricación de acoples personalizado y optimizados para brazo robótico con ayuda de la impresión 3D
Sector
Plástico
Aplicación
Utillaje
Impresora usada
JCR 3D 1000
Material
Nylon
Problema
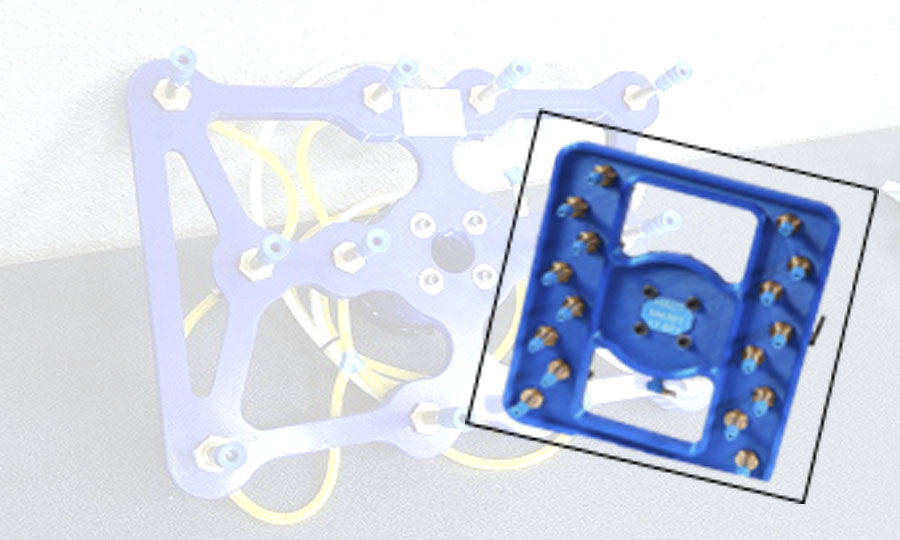
Necesitamos crear garras de cogida por vacío con una geometría precisa adaptadas a las piezas a sujetar.
Reducción del peso: Menos desgaste y consumo del robot en su uso (menos carga).
La fabricación del útil por mecanizado suponía:
- Asumir 10 días de plazo de entrega.
- Altos costes de fabricación
- Pesos del útil de 2 a10 veces superiores
- Necesidad de almacenaje y stock de las diferentes referencias
Solución
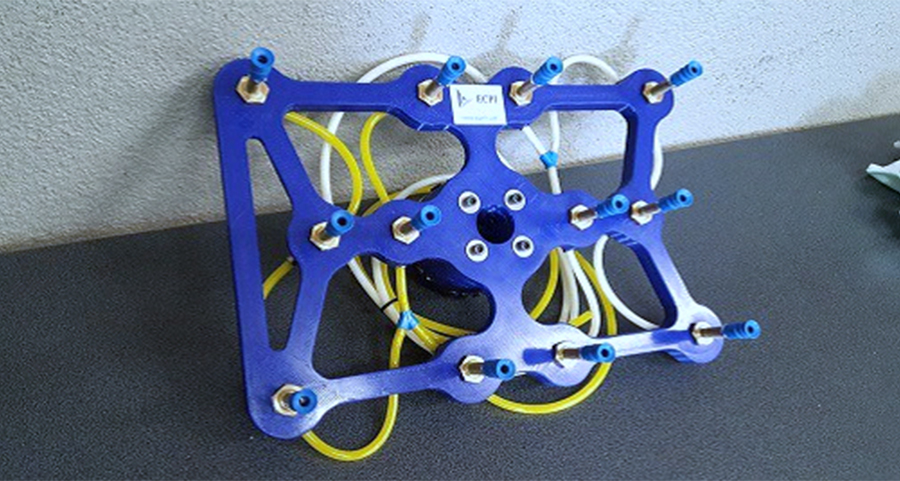
Diseño y fabricación de garras de cogida por vacío a medida optimizadas con una serie de ventajas a las fabricadas con el método tradicional de fabricación:
Geometría adaptada a la pieza a sujetar, libertad de diseño.
Reducción del peso: uso de materiales más ligeros, optimizaciones geométricas e internas de la propia estructura impresa.
Posibilidad de fabricación modular para simplificar el desmontaje.
Posibilidad de producción bajo demanda por impresión 3D.
Estudio del caso
TIEMPO
COSTES
PESO
MECANIZADO CNC
10 días
150€
5100g
JCR 3D
10 horas
18,6 €
500 g
AHORRO
x34
x13
x10